Sterowanie Servo Tower PRO SG90 z GPIO na Raspberry Pi(PWM)
Sterowanie Servo Tower PRO SG90 z GPIO na Raspberry Pi(PWM)
Akcesoria:
W celu podłączenia diody potrzebne jest:Servo Tower PRO SG90
Jumper Kabel
Płytka prototypowa

Należy podłączyc tak jak na rysunku
Należy pamiętać te servo obraca się tylko o 180 stopni.
Także zwykłe zasilanie z portu usb nie wystarczy serwomechanizmy pobierają wiecej prądu.
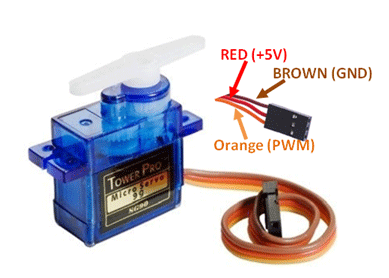
Pinout serwomechanizmu:
Oprogramowanie
Zanim zaczniemy, należy zainstalować potrzebne biblioteki:sudo apt-get install -y python-pip
sudo pip install wiringpisudo apt-get install -y wiringpi
Przykład programu sterowania w pythonie:
# Servo Control
import time
import wiringpi
# use 'GPIO naming'
wiringpi.wiringPiSetupGpio()
# set #18 to be a PWM output
wiringpi.pinMode(18, wiringpi.GPIO.PWM_OUTPUT)
# set the PWM mode to milliseconds stype
wiringpi.pwmSetMode(wiringpi.GPIO.PWM_MODE_MS)
# divide down clock
wiringpi.pwmSetClock(192)
wiringpi.pwmSetRange(2000)
delay_period = 0.01
while True:
for pulse in range(50, 250, 1):
wiringpi.pwmWrite(18, pulse)
time.sleep(delay_period)
for pulse in range(250, 50, -1):
wiringpi.pwmWrite(18, pulse)
time.sleep(delay_period)
$ nano servo.py$ sudo python servo.pyŹródło: https://learn.adafruit.com/adafruits-raspberry-pi-lesson-8-using-a-servo-motor/